MPU6050姿态解算1-DMP方式
MPU6050的姿态解算方法有多种,包括硬件方式的DMP解算,软件方式的欧拉角与旋转矩阵解算,软件方式的轴角法与四元数解算。本篇先介绍最易操作的DMP方式。
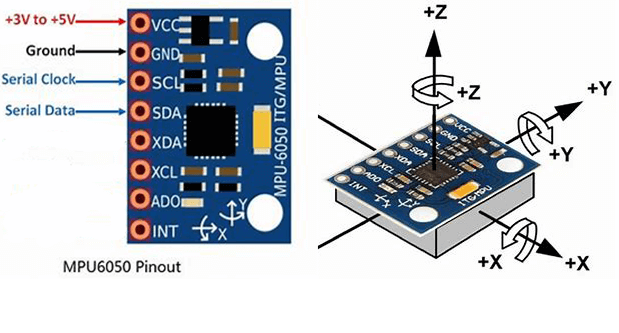
MPU6050基本功能
3轴陀螺仪
陀螺仪,测量的是绕xyz轴转动的角速度,对角速度积分可以得到角度。
3轴加速度计
加速度计,测量的是xyz方向受到的加速度。在静止时,测量到的是重力加速度,因此当物体倾斜时,根据重力的分力可以粗略的计算角度。在运动时,除了重力加速度,还叠加了由于运动产生的加速度。
DMP简介
就是MPU6050内部的运动引擎,全称Digital Motion Processor,直接输出四元数,可以减轻外围微处理器的工作负担且避免了繁琐的滤波和数据融合。Motion Driver是Invensense针对其运动传感器的软件包,并非全部开源,核心的算法部分是针对ARM处理器和MSP430处理器编译成了静态链接库,适用于MPU6050/MPU6500/MPU9150/MPU9250等传感器。
四元数转欧拉角
四元数可以方便的表示3维空间的旋转,但其概念不太好理解,可以先类比复数,复数表示的其实是2维平面中的旋转。
四元数的基本表示形式为:q0+q1*i+q2*j+q3*k,即1个实部3个虚部,具体细节本篇先不做展开介绍。
四元数虽然方便表示旋转,但其形式不太直观,旋转转换成pitch、roll、yaw的表示形式,方便观察姿态。
转换公式为:
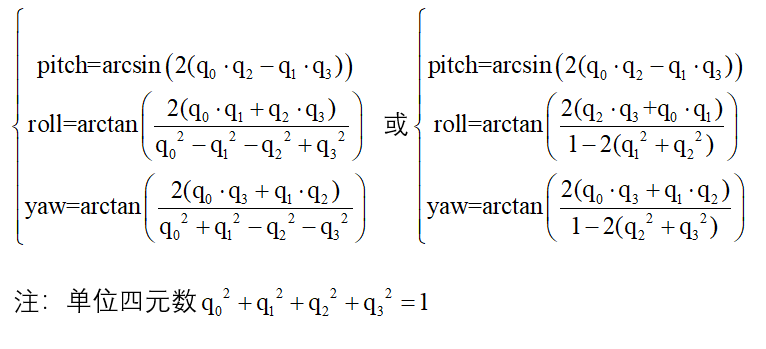
程序表示为:
1 | pitch = asin(-2 * q1 * q3 + 2 * q0* q2) |
已在STM32F407以及FreeRTOS上进行测试,视频效果如下:
-------------纸短情长 下次再见-------------
关注微信公众号,获取更多精彩~
http://xxpcb.gitee.io/2020/08/23/MPU6050%E5%A7%BF%E6%80%81%E8%A7%A3%E7%AE%971-DMP%E6%96%B9%E5%BC%8F/
本博客所有文章除特别声明外,均采用 CC BY-NC-SA 4.0 许可协议。转载请注明来自 码农爱学习的博客!

评论
公告
分享:单片机、嵌入式、ARM、Linux、C/C++、python等技术文章~