之前的几篇文章对FreeRTOS的部分源码进行了分析,可以发现FreeRTOS对于任务、事件标志组、消息队列等的实现都是通过控制块的方式来操作。
比如任务()有任务控制块TCB_t,
事件标志组()有事件控制块EventGroup_t,
消息队列()有消息队列控制块Queue_t,
软件定时器()有软件定时器控制块Timer_t。
使用它们前都是先创建(内存分配资源),返回一个控制块的句柄,之后就可以通过句柄来操作这个对象了。
基本原理
以FreeRTOS的这种机制为参考,我们可以模仿着实现一个简单的滤波器,可以用于对传感器的原始数据进行滤波。
先来分析一下基本原理:
- 设定我们的滑动平均滤波器的窗口宽度为5,可以使用一个数组来实现
- 使用一个index来指示下次数据将要存放在数组中的位置
- 初始状态,滤波器数组都是0,index指向数组的起始位置

开始阶段
原始数据依次存入滤波器数组,这时的滤波器输出有两种选择:
- 方式1:既然数组还未存满,就先不输出滤波结果
- 方式2:虽然数组还未存满,但可以计算已经存入的这几个数的平均值作为滤波输出
这两种方式只在初始阶段存在差别,本文后续编码将采用方式2。

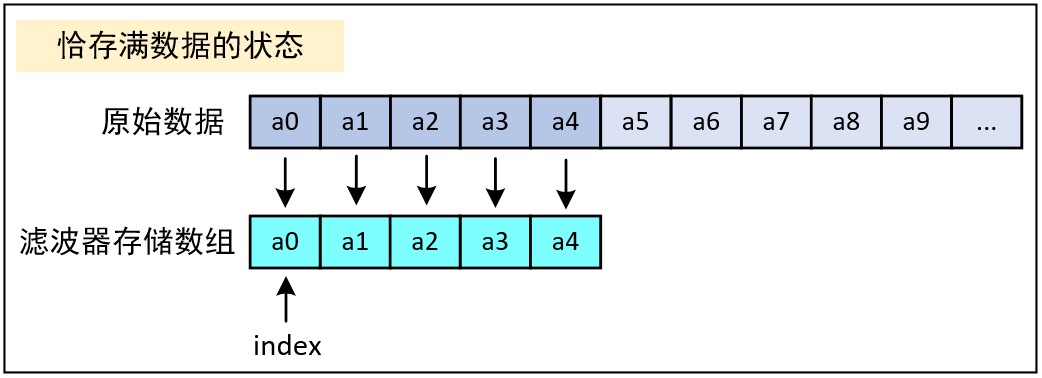
数据第1次存满滤波器数组
数据继续存入滤波器数组,当恰好存满时,就可以计算整个数组的平均值了,作为此次的滤波结果。
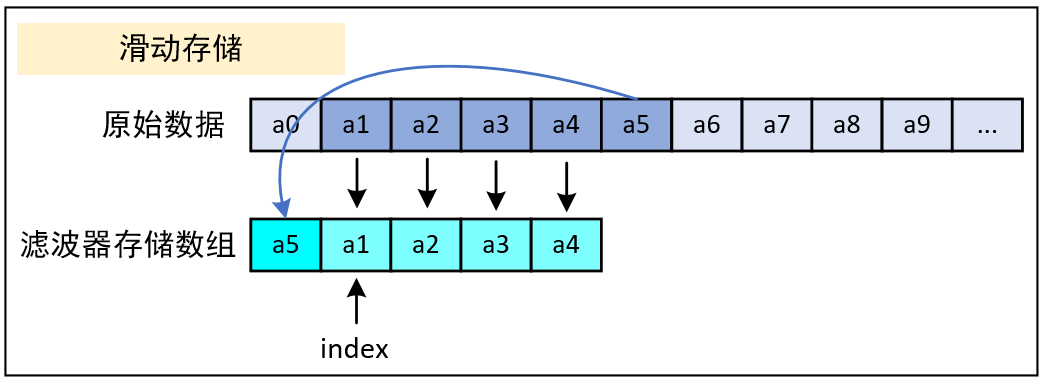
滑动存储阶段
滤波器数组首次存满后,就需要进行覆盖存储了(实现滑动获取数据的效果)。
这里也有两种方式:
- 方式1:将新的数据(a5)覆盖存入最早的数据(a0),然后遍历数组求和,再求平均值作为输出
- 方式2:借用上次的求和数据
sum(a0~a4),将sum先减去最早的数据(a0),加上新的数据(a5),再将新的数据(a5)覆盖存入最早的数据(a0),最后对sum除以5求平均值作为输出
相比较而言,方式2的计算量更小,本文后续编码将采用方式2。
编码实现
下面来看一下编码实现:
滤波器控制块
参考FreeRTOS的设计方式,为我们的滑动平均滤波器设计一个控制块,也就是一个结构体,该结构体包含滤波器所需要的资源。
1
2
3
4
5
6
7
8
9
10
11
12
|
typedef struct SlipAveFilter
{
u16 len;
u16 index;
u16 has;
char isfull;
float *data;
float sum;
float res;
} SAFiter_t;
|
创建滤波器
参考FreeRTOS的设计方式,使用滤波器时,通过创建函数来创建一个滤波器,创建好之后,会返回一个句柄以供后续对滤波器操作。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
|
SAFilterHandle_t SlipAveFilterCreate(u16 len)
{
if(len < 1)
{
len = 1;
}
SAFiter_t *newFilter;
newFilter = MALLOC(sizeof(SAFiter_t));
newFilter->data = MALLOC(len * sizeof(float));
newFilter->len = len;
newFilter->index = 0;
newFilter->has = 0;
newFilter->isfull = 0;
newFilter->sum = 0;
newFilter->res = 0;
return newFilter;
}
|
获取滤波结果
参考FreeRTOS的设计方式,在获取滤波结果时,将之前创建的滤波器句柄作为参数传进来,实现对特定滤波数据的获取。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
|
float GetSAFiterRes(SAFilterHandle_t SAFiter, float input)
{
SAFiter_t *pFilter = (SAFiter_t *)SAFiter;
if(!pFilter->isfull)
{
pFilter->has++;
if(pFilter->has == pFilter->len)
{
pFilter->isfull = 1;
}
}
else
{
pFilter->sum -= pFilter->data[pFilter->index];
}
pFilter->data[pFilter->index] = input;
pFilter->sum += input;
pFilter->index = (pFilter->index == pFilter->len - 1) ? 0 : pFilter->index + 1;
pFilter->res = pFilter->sum / pFilter->has;
return pFilter->res;
}
|
使用示例
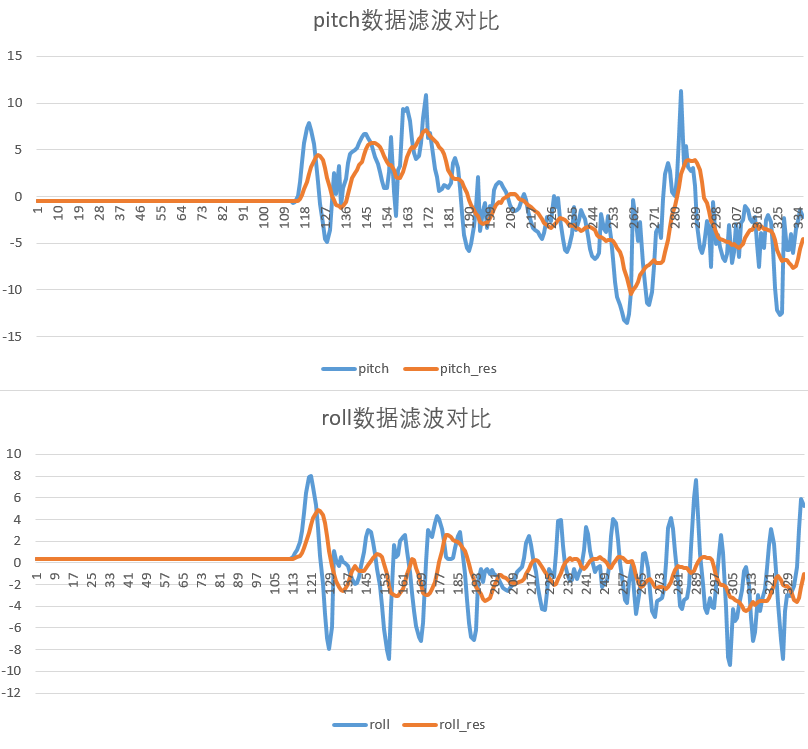
以MPU6050陀螺仪的数据滤波为例(相关介绍参考),假设需要对pitch数据和roll数据进行滤波,使用方式为:
- 定义2滤波器句柄
- 创建2滤波器
- 循环获取数据并滤波
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
|
SAFilterHandle_t SAFilter_pitch;
SAFilterHandle_t SAFilter_roll;
SAFilter_pitch = SlipAveFilterCreate(10);
SAFilter_roll = SlipAveFilterCreate(10);
while(1)
{
if(mpu_dmp_get_data(&pitch,&roll,&yaw,&accx,&accy,&accz,&gyrox,&gyroy,&gyroz)==0)
{
pitch_res = GetSAFiterRes(SAFilter_pitch,pitch);
roll_res = GetSAFiterRes(SAFilter_roll,roll);
printf("pitch:%f,%f,roll:%f,%f\r\n",pitch,pitch_res,roll,roll_res);
}
vTaskDelay(1);
}
|
滤波后的结果如下,蓝色为原始数据,橙色为滤波后的结果: