电机控制基础--定时器编码器模式使用与转速计算
上篇介绍了定时器捕获输入脉冲的原理(),那种方式是根据捕获的原理,手动切换上升沿与下降沿捕获,计算脉冲宽度的过程原理比较清晰,但编程操作起来比较麻烦。
对于电机测速用到的正交编码器,测速时需要捕获2路脉冲,如果使用上一篇介绍的方法,编程就较为复杂。还好单片机的通用定时器具有专门的正交编码器接口,只需配置相应的寄存器,就可实现编码器输入的上下沿自动捕获与计数,非常便于编码器的测速。
下面就来介绍下定时器的编码器模式的使用:
1 正反转计数原理示例
编码器模式下,计数器的计数方向代表的电机的正转与反转,计数的大小代表了转速的大小。
如下图,电机正转时,编码器的通道A(TI1)的信号超前通道B,计数器向上计数,反转时,通道A的信号滞后,向下计数。
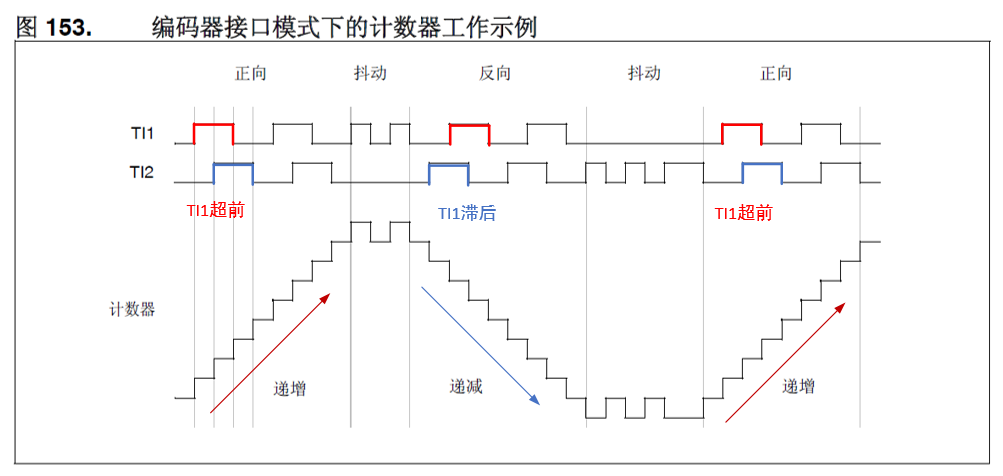
设置信号的极性反相,可以使向下计数代表电机正转。
2 定时器编码器模式配置
以STM32 芯片为例,其内部有专门用来采集增量式编码器方波信号的接口,这些接口实际上是STM32 定时器的其中一种功能。不过编码器接口功能只有高级定时器TIM1、TIM8 和通用定时器的TIM2~TIM5 才有。

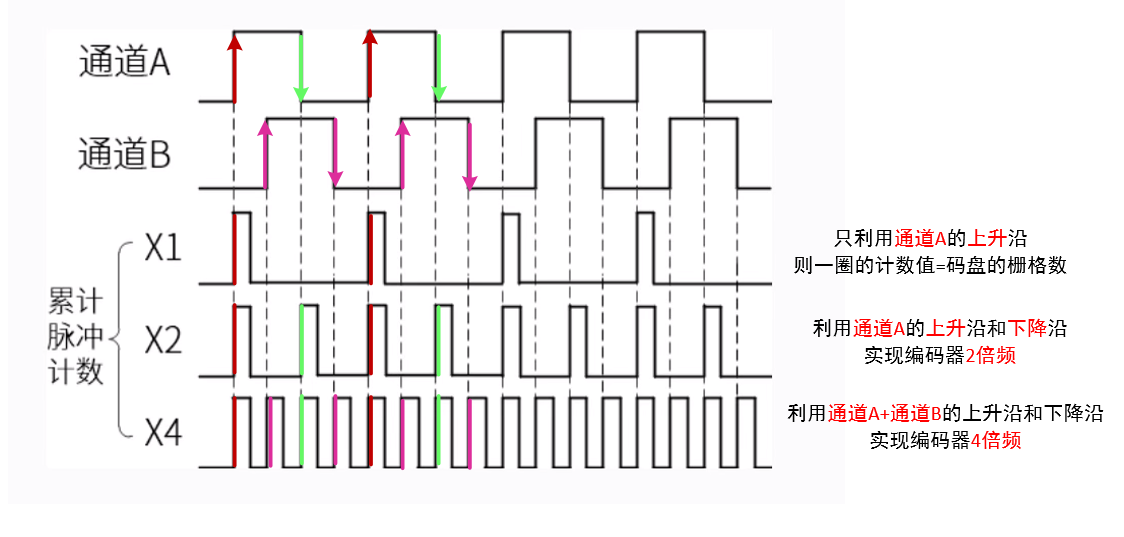
正交编码器有两路正交的输入信号(关于正交编码的介绍,可查看之前的文章:),根据实际需要,可以设置只捕获某个通道的上升沿或下降沿,也可以设置同时捕获两个通道的上升沿与下降沿,这样就可以提高编码器的计数精度,实现倍频。
编码器模式的配置实际上是通过配置SMCR寄存器和CCER寄存器来实现。
2.1 SMCR寄存器配置触发模式
SMCR即从模式控制寄存器(slave mode control register),查阅STM32F4的参考手册,可以找到类似如下信息,现在我们只需关注SMS这几位:

- 位 15 ETP:外部触发极性 (External trigger polarity)
- 位 14 ECE:外部时钟使能 (External clock enable)
- 位 13:12 ETPS:外部触发预分频器 (External trigger prescaler)
- 位 11:8 ETF[3:0]:外部触发滤波器 (External trigger filter)
- 位 7 MSM:主/从模式 (Master/Slave mode)
- 位 6:4 TS:触发选择 (Trigger selection)
- 位 3 保留,必须保持复位值
- 位 2:0 SMS:从模式选择 (Slave mode selection)
- 000:禁止从模式––如果 CEN =“1”,预分频器时钟直接由内部时钟提供。
- 001:编码器模式 1––计数器根据 TI1FP1 电平在 **TI2FP2 边沿 **递增/递减计数。
- 010:编码器模式 2––计数器根据 TI2FP2 电平在 TI1FP1 边沿 递增/递减计数。
- 011:编码器模式 3––计数器在 TI1FP1 和 TI2FP2 的边沿计数,计数的方向取决于另外一个信号的电平。
- 100:复位模式––在出现所选触发输入 (TRGI) 上升沿时,重新初始化计数器并生成一个寄存器更新事件。
- 101:门控模式––触发输入 (TRGI) 为高电平时使能计数器时钟。只要触发输入变为低电平,计数器立即停止计数(但不复位)。计数器的启动和停止都是受控的。
- 110:触发模式––触发信号 TRGI 出现上升沿时启动计数器(但不复位)。只控制计数器的启动。
- 111:外部时钟模式 1––由所选触发信号 (TRGI) 的上升沿提供计数器时钟。
上面的SMCR寄存器介绍中,关于TI1、TI2等的函数:
TI1 和 TI2对应编码器的A、B两相输入信号。
TI1FP1 和 TI2FP2 是进行输入滤波器和极性选择后 TI1 和 TI2 的信号,如果不进行滤波和反相,则 TI1FP1=TI1,TI2FP2=TI2。
从上面的SMCR寄存器的功能介绍可知,选择编码器接口模式时:
如果计数器仅在 TI2 边沿处计数,在 TIMx_SMCR 寄存器中写入 SMS=001
如果计数器仅在 TI1 边沿处计数,写入 SMS=010
如果计数器在 TI1 和 TI2 边沿处均计数,则写入 SMS=011
定时器的编码器模式根据两个输入的信号转换序列,产生计数脉冲和方向信号。根据该信号转换序列,计数器相应递增或递减计数,同时硬件对 TIMx_CR1 寄存器的DIR位进行相应修改。任何输入(TI1 或 TI2)发生信号转换时,都会计算 DIR 位。
2.2 CCER寄存器配置极性
通过编程 TIMx_CCER 寄存器的 CC1P 和 CC2P 位,可以选择 TI1 和 TI2 极性。实际上就是设置TIxFP1 是否与TIx反相,来设置正转时是向下计数还是向下计数。

位 15、11、7、3 CCxNP:捕获 /比较x 输出极性 (Capture/Comparex output Polarity)
位 14、10、6、2 保留,必须保持复位值
位 13、9、5、1 CCxP:捕获 /比较x 输出极性 (Capture/Comparex output Polarity)。
CCx 通道配置为输出:
- 0:OCx 高电平有效
- 1:OCx低电平有效
CCx 通道配置为输入:
CCxNP/CCxP 位可针对触发或捕获操作选择 TI1FP1 和 TI2FP1 的极性。
00:非反相/上升沿触发电路对 TIxFP1 上升沿敏感(在复位模式、外部时钟模式或触发模式下执行捕获或触发操作), TIxFP1 未反相 (在门控模式或编码器模式下执行触发操作)。01:反相/下降沿触发 电路对 TIxFP1 下降沿敏感 (在复位模式、外部时钟模式或触发模式下执行捕获或触发操作), TIxFP1 反相 (在门控模式或编码器模式下执行触发操作)。10:保留,不使用此配置。11:非反相/上升沿和下降沿均触发 电路对 TIxFP1 上升沿和下降沿都敏感(在复位模式、外部时钟模式或触发模式下执行捕获或触发操作),TIxFP1 未反相(在门控模式下执行触发操作)。**编码器模式下不得使用此配置!!!**。
位 12、8、4、0 CCxE:捕获 /比较 x 输出使能 (Capture/Comparex output enable)
注:在编码器模式下,极性的作用是设置TIxFP1 是否反相,不要被”上升沿敏感“误导为是只捕获上升沿信号!
”上升沿敏感“是在非编码器模式下的功能。所以,编码模式下,只能配置为
00或01。另一方面来看,编码器模式下,只能通过SMCR的模式设置倍频,要么是2倍频,要么是4倍频,貌似不能设置1倍频(只对1个通道的上升沿或下降沿计数)。
2.3 CCMR寄存器配滤波参数
如果需要,通过配置CCMR寄存器的IC1F与IC2F,还可以对编码器输入信号进行滤波配置:

这些寄存器的说明在上篇文章已有介绍,这里不再展开。
3 计数方向对照表解读
编码器模式下,计数器的计数方向(递增计数还是递减计数)会根据增量编码器的速度和方向自动进行修改,因此,其计数值始终表示编码器的位置。计数方向对应于所连传感器的旋转方向。下表汇总了可能的组合(假设 TI1 和 TI2 不同时切换)。
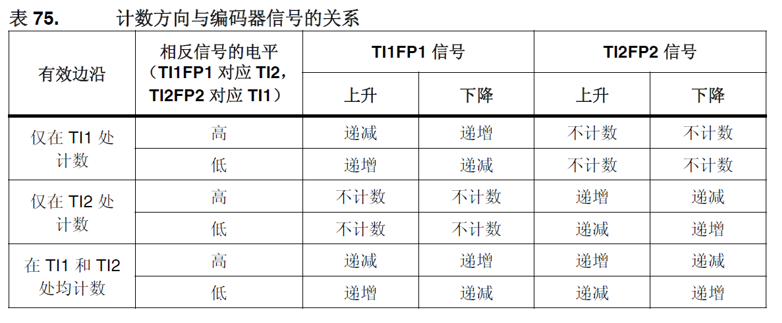
注:STM32 的编码器接口在计数的时候,并不是单纯采集某一通道信号的上升沿或下降沿,而是需要综合另一个通道信号的电平。(通俗的讲就是,使用编码器接口时,编码器的两个输入通道A与通道B都需要进行电路连接!!!,虽然你设置了仅在某一个通道上计数,但这个通道的计数时机需要参考另一路通道的信号)表中“相反信号的电平”指的就是在计数的时候所参考的另一个通道信号的电平,这些电平决定了计数器的计数方向。
3.1 仅在TI1处计数
这里的仅在TI1处计数,就是仅统计编码器的通道A的信号跳变,先以电机正转为例:
注:以下的介绍中,“通道A“代表TI1,“通道B“代表TI2。
3.1.1 电机正转(向上计数)
假定电机正转时,编码的通道A的信号比通道B提前1/4个周期(也即相位提前90度),在通道A的上升沿与下降沿均计数(如下图TI1波形中的绿色和红色箭头),因为计数的方向代表的电机转动的方向,所以,在正转的情况下:
- 通道A上升沿,通道B为低电平,向上计数,代表电机正转
- 通道A下降沿,通道B为高电平,向上计数,代表电机正转

3.1.2 电机反转(向下计数)
反转的情况,编码的通道A的信号比通道B滞后1/4个周期:
- 通道A下降沿,通道B为低电平,向上计数,代表电机反转
- 通道A上升沿,通道B为高电平,向上计数,代表电机反转

3.2 仅在TI2处计数
仅在TI2处计数,就是仅统计编码器的通道B的信号跳变,同样可以分为正转和反转两种情况,具体的对应关系参考上面的”仅在TI1处计数“自行分析,实际上通道A与通道B从自身来说功能是等价的。
3.3 在TI1与TI2处均计数
在TI1与TI2处均计数,就是讲编码器的通道A与通道B的信号均统计并进行计数,这样可以提高计数频率,实现倍频。
这里还以电机正转为例*:
观察下图,编码器在开始阶段可依次捕获到:通道A上升沿、通道B上升沿、通道A下降沿、通道B下降沿,所以有:
- 通道A上升沿,通道B为低电平,向上计数,代表电机正转
- 通道B上升沿,通道A为高电平,向上计数,代表电机正转
- 通道A下降沿,通道B为高电平,向上计数,代表电机正转
- 通道B下降沿,通道A为高电平,向上计数,代表电机正转

4 编程实现
4.1 定时器编码器模式配置
这里使用的通用定时器中的 TIM4,配置定时器最基础的功能就是要配置时基,使用输入功能还要配置定时器的GPIO和输入通道。
1 |
|
这里将定时器的计数溢出值设为65535,即TIM4的计数最大值(TIM4为16位计数器)。目的是避免计数器溢出,简化后续的速度计算方式(计数器器若溢出,在计算转速时,还要将溢出的次数考虑进去)。
编码器模式设置为TIM_EncoderMode_TI12,即两路信号均计数,实现4倍频。
编码器两个输入的极性均设置为TIM_ICPolarity_Rising,即极性不反相。
这里编码器模式的设置,调用了TIM_EncoderInterfaceConfig()函数,其内部即是对相关的寄存器进行配置:
1 | void TIM_EncoderInterfaceConfig(TIM_TypeDef* TIMx, uint16_t TIM_EncoderMode, uint16_t TIM_IC1Polarity, uint16_t TIM_IC2Polarity) |
4.2 电机转轴转速计算
这里使用一款直流减速电机:
- 减速比是34(即电机转轴转1圈,电机本身要转34圈)
- 电机转一圈的物理脉冲数是11
所以,电机转轴转1圈时,可以产生的物理脉冲为34*11=374个,又由于编码器器模式实现了4倍频计数,所以,电机转轴转1圈时,定时器可以计数374×4=1496个。
对于转速的计算,这里使用M法测速(M法测速的具体原理参考之前的文章:),即统计固定时间间隔内的编码器的脉冲数,来计算速度值。
$ \displaystyle n = {\frac {M_0 } {(C * T_0)}} $,单位为:转/秒
- C:编码器单圈总脉冲数
- $T_0$ 每次的统计时间(单位为秒)
- $M_0$:该时间内统计到的编码器脉冲数
比如,对于本次实验的电机,转轴转1圈时,定时器计数1496个,即C=1496个,对应程序中的TOTAL_RESOLUTION。T0可以选择100ms,即0.1s。
程序编写如下,这里通过另外一个定时器7来实现每100ms调用一次calc_motor_rotate_speed()函数来进行转速的实时计算,每次使用read_encoder()读取编码器器的值后,都将计数值CNT设为初始值0,重新开始计数,这样就可以保证每次读到的都是上个100ms的计数值。
另外,这里通过将CNT的uint32类型的计数值, 转为int16类型,就可以利用正负来区分上个100ms电机整体的转动方向(正转CNT从0向上计数,转为int16还是正值;反转CNT从0向下计数,会溢出,转为int16就为负数)。
1 |
|
5 实验演示
通过串口发送指令,控制另外一个定时器产生指定占空比的PWM来控制电机进行恒速转动,然后测试编码器读到的速度值。
(串口指令用到了字符串切割和串口接收不定长字符的功能,可参考之前的文章:与 中的部分内容,PWM的产生可参考:)
视频中,串口打印的encoder为100ms内读到的编码器器的计数值,正负号代表正反转,speed为根据编码器的计数值计算的电机输出轴的转速,单位为圈每秒。
首先是全速正反转,转速接近5圈每秒。
然后通过调整pwm,使得电机转轴转速接近1圈每秒,由于转1圈的脉冲理论上有1496个,现在是每100ms读一次,所以能读到149个左右,符合理论值。